Neurological conditions relevant to P&O
Subcortical Sensorimotor Control
Making a Movement
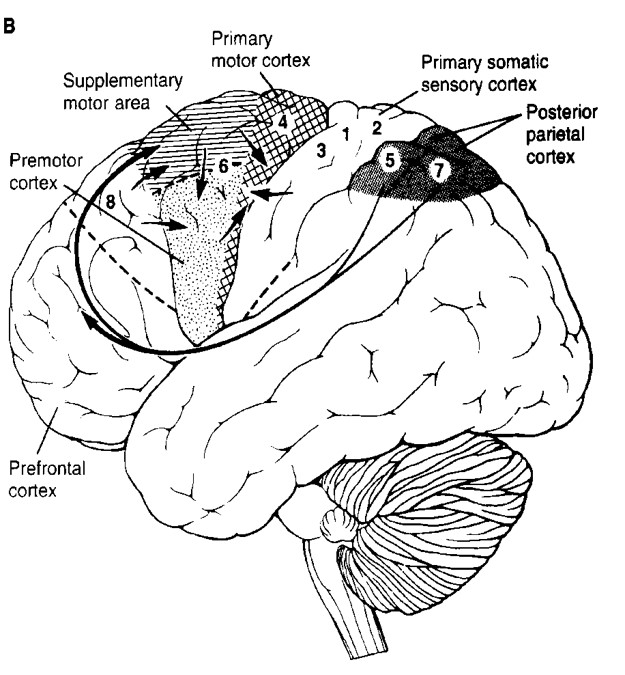
Perception: - Sensory event (S-I & S-II) - Behavioural Relevance (intention)
Cognition: - Locate Goal in Space (PPC)? - Inform motor areas - Formulate movement sequence - SMA and premotor area
Action/Execution: - Send motor command M1 - Use sensory feedback to monitor and adjust
Coordination of cognition and muscular activation
The neural structures controlling movement are required to adapt to constraints that are imposed by the structure of the musculoskeletal system (any impairments that may be present) the physical laws governing movement (environmental constraints), and the intended goal of the movement (task constraints)
Motor Control
How sensory information is integrated with intention in order to plan and execute appropriate muscle forces that generate the desired movement - biomechanics, - muscle physiology, - neurophysiology - cognitive psychology
Degrees of Freedom Problem: Bernstein 1967
Joint Level:
- Hip joint = 3 values
- Knee joint = 1 value
- Ankle = 2 value
- Foot = 1 value
Muscle Level:
- Hip = 17 muscles/values
- Knee = 11 muscles
- Ankle = 11 values
Motor Unit Level:
- 100 motor units per muscle (estimate)
- 39 muscles * 100 MU = 3900 individual values
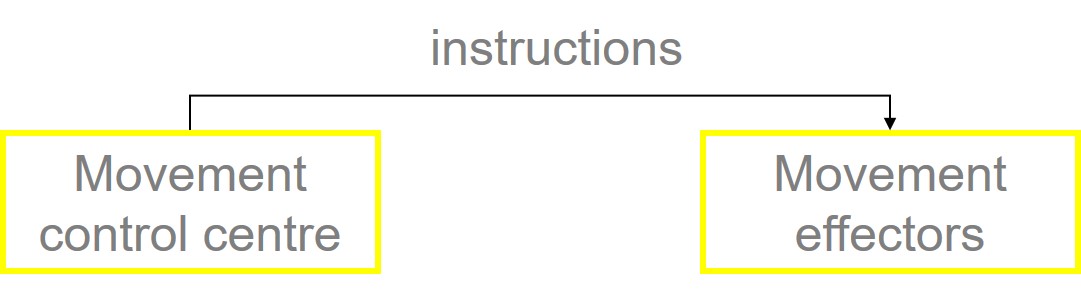
Open and Closed Loop Systems
Open Loop Control
Motor program: Keele (1968) – described a motor program as “a set of muscle commands that are structured before a movement sequence begins, and that allows the entire sequence to be carried out uninfluenced by peripheral feedback”
Closed Loop Control
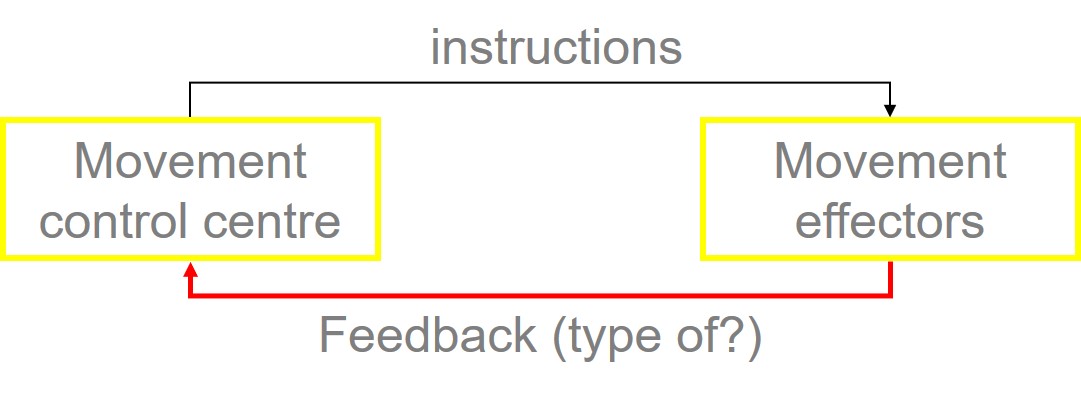
Open loop vs closed loop control:
- Reaction time is the measure indicating how much processing occurs in the movement control
- Feedback delay ~ 80 ms
Is Walking an Example of Open Loop Control?
Dorsal rhizotomy (removing all afferents) does not prevent rhythmic locomotion (e.g. Giuliani CA and Smith JL. 1987)
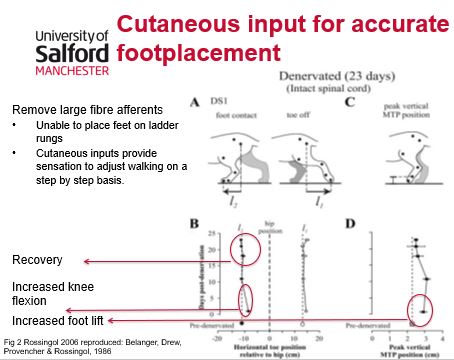
Destruction of large fibre afferents does not stop recovery of locomotion (e.g. Pearson KG, Misiaszek JE, and Hulliger M. 2003)
In humans slow locomotion with vision is possible after loss of large sensory fibres below the neck (e.g. Lajoie Y, Teasdale N, Cole JD, Burnett M, Bard C, Fleury M, Forget R, Paillard J, and Lamarre Y. 1996)
….If we don’t need sensation to walk then how is it controlled????
Central Pattern Generation (CPG)
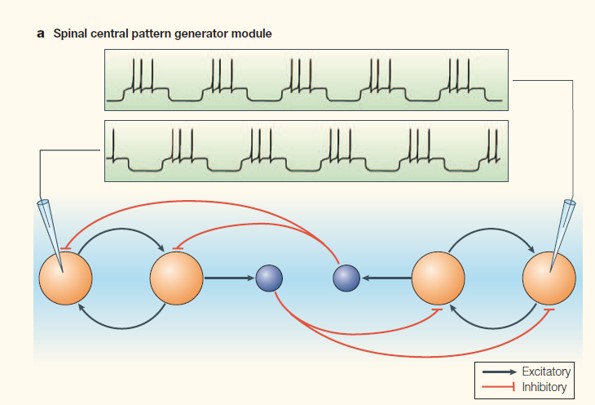
A Central Pattern Generator is a network of neurones that can generate a stereotyped rhythmic movement without sensory afference or somatic feedback (Grillner, 1981; Grillner and Wallen, 1985).
It can be activated/sustained by a triggering stimulus (either tonic or phasic), but requires no modulation of the input to generate the basic pattern.
Half Centre Model
Graham Brown (1911): Stepping is a centrally initiated and cyclic reflex essentially independent of – although modifiable by- peripheral stimuli.
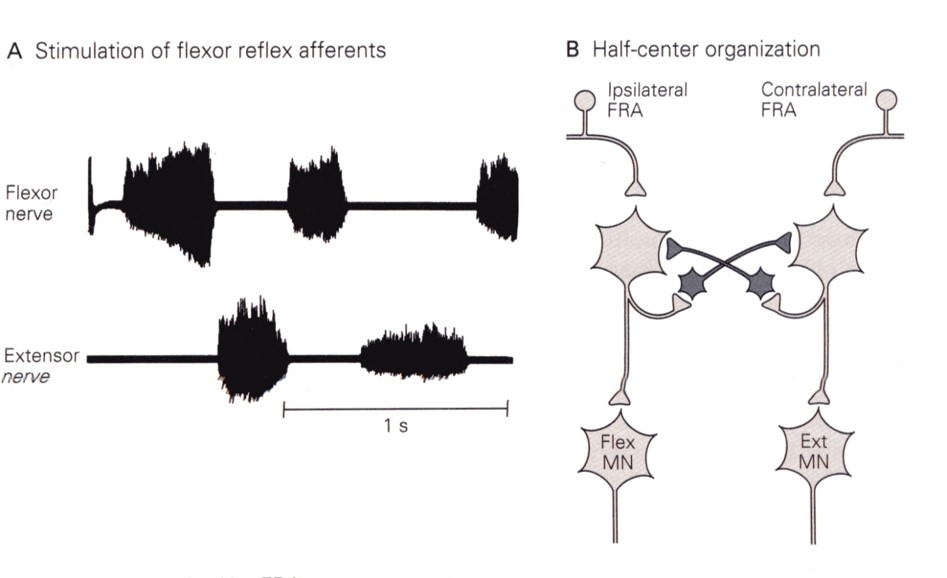
Evidence Supporting Half Centre Model
Brief electrical stimulation of high threshold cutaneous and muscle afferents FRAs – sustained flexor or extensor MN bursts.
Nialamide (prolongs action of NA) – rhythmic reciprocal activity in flexors and extensors
Interneurones generating flexor bursts found to inhibit interneurones generating extensor bursts
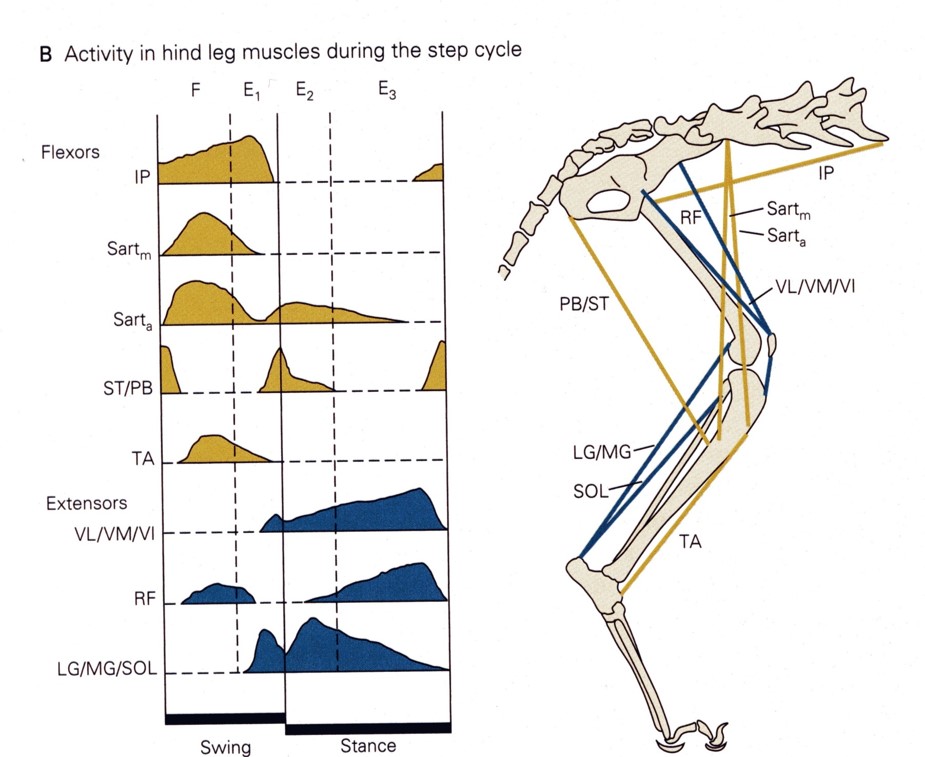
CPGs support oscillation of flex/ext activity: but locomotion is more complex
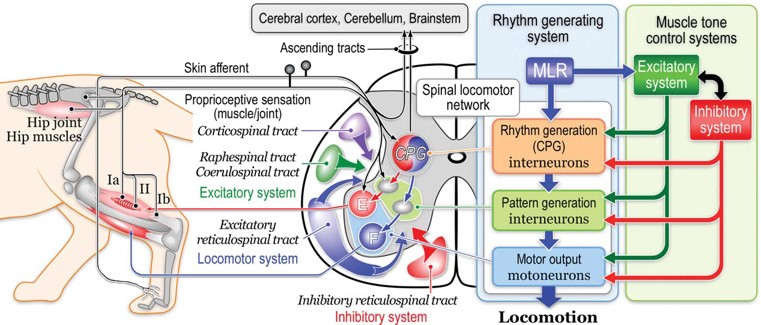
Neural networks within the spinal cord alone do not enable postural control.
Integration of descending supraspinal signals and peripheral sensory afferents at the level of spinal cord is necessary for full execution of postural control.
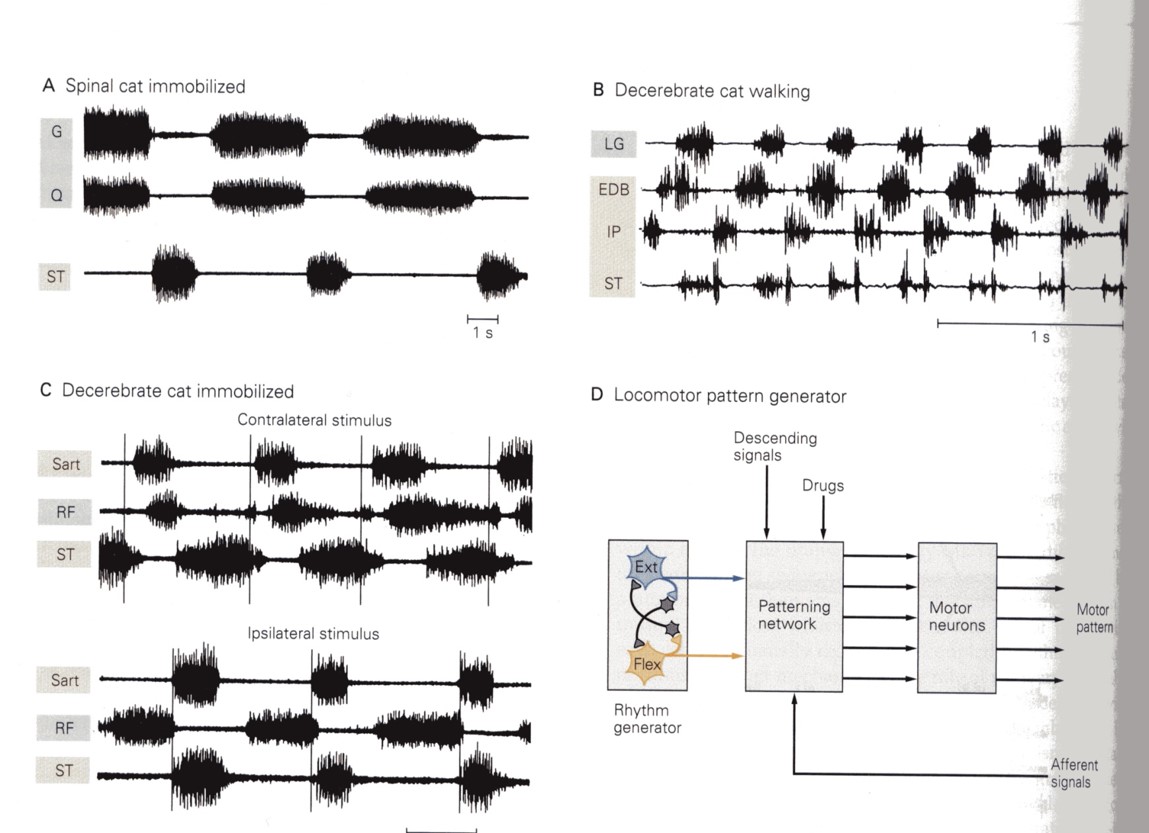
CPGs Can Generate Complex Motor Patterns
A: No afferent feedback (immobilized) & no descending input (spinalized) = flex/ext oscillation
B: Subcortical descending modulation of spinal half centre = walking EMG
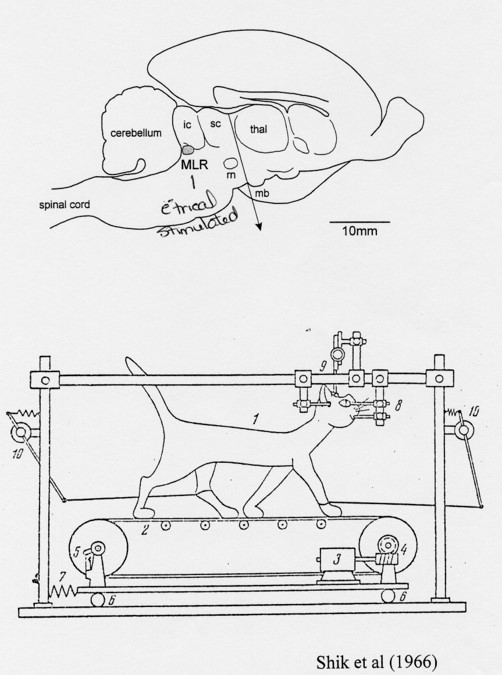
C: afferent input (stimulus) & subcortical descending input
Effects of MLR stimulation at different strengths in decerebrate cat
Differences in gait patterns according to strength of the stimulus (walk, trot and gallop)
Summary
Rhythm generation (mutually inhibitory flexor/extensor half centres)
Integration of sensation to modulate rhythm output yielding complex movement patterns
Regulation of postural tone/ anticipatory postural control
Summary So Far
- Basic rhythmicity of stepping produced within spinal cord (CPGs)
- i.e. stepping can be produced by an open-loop control system
CPGs do not require sensory input but sensory input can affect locomotor rhythms……
HOW does sensation influence locomotion??
Cutaneous Input
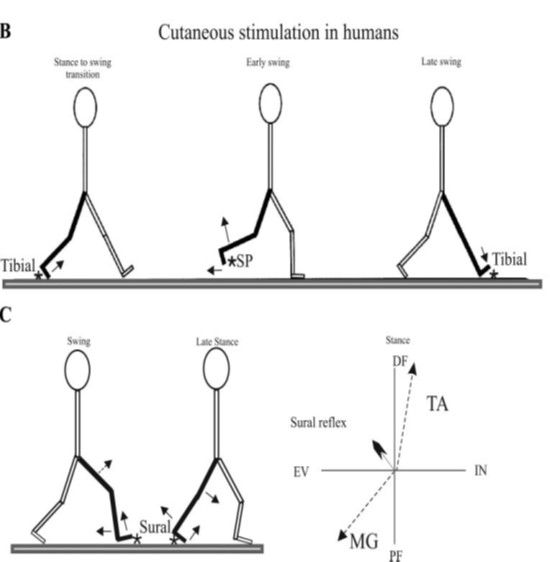
Phase dependent cutaneous response: reflex reversal
Early BF of the ipsilateral leg, & later RF = withdrawl. Simultaneous extensor activity in contralateral limb
(Middle Arrow) Late swing = lowering strategy to put the foot down as soon as possible. (via inhibition of RF or activation of BF)
(Left and Right Arrow) Ankle flexion at the stance to swing transition to remove the foot, whereas it produces an ankle extension in late swing to accelerate foot placement on the ground (Zehr et al 1997).
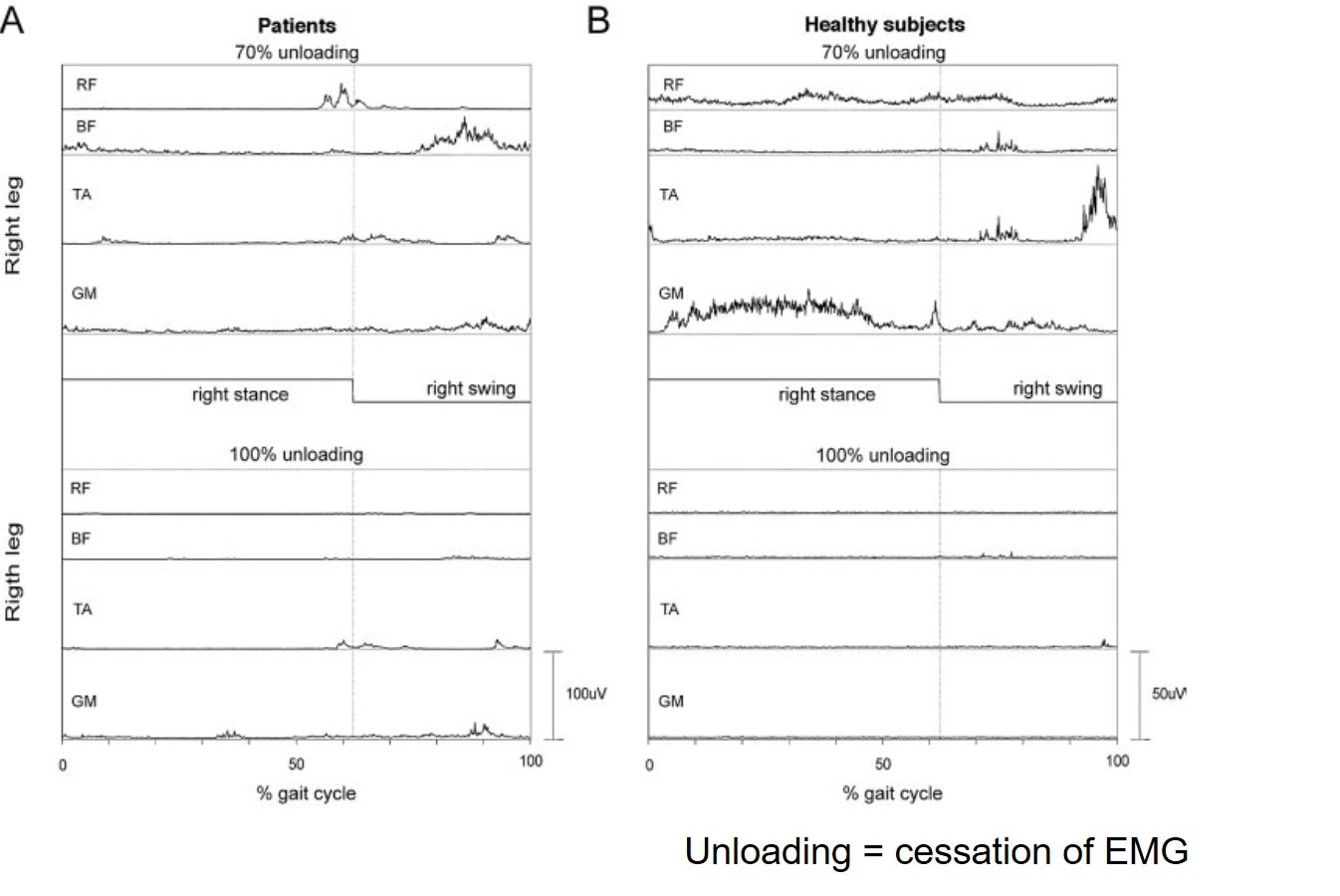
Muscle afferents – phase duration and amount of activation
A: Hip walking – EMG not significantly different
B: Unloading = cessation of EMG
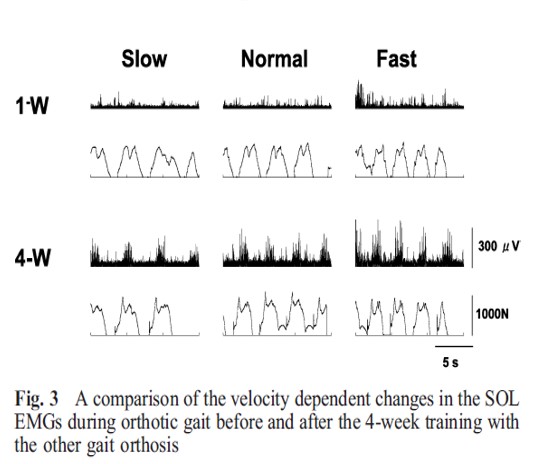
Locomotor training can improve EMG below SCI
3 complete SCI T8-12, 1hr training 5 days/wk for 12 weeks.
Exoskeleton was effectively hip walker. EMG activity is due to hip joint motion and loading (synchronised SOL burst with GRF/stance).
Stretch reflex was not active until threshold velocities above peak velocity during fast gait. So EMG activations are NOT the result of spinal stretch reflexes.
Supraspinal compensatory sensorimotor control
“The fact that intact cats can walk without cutaneous inputs should not be interpreted to mean that cutaneous inputs are not normally used but rather that other sensory modalities (i.e., proprioceptive) can substitute the missing cutaneous inputs, a substitution which most probably depends on supraspinal controls and cannot be achieved in the spinal state.” (Rossingol 2006; pg 94)
Visual locomotor control
Remote control of human locomotion by vestibular stimulation
Phase dependent visuolocomotor control
- Hollands MA et al:
- gaze shifts typically made late in stance phase
- but can look further ahead than one step (depending on specific task)
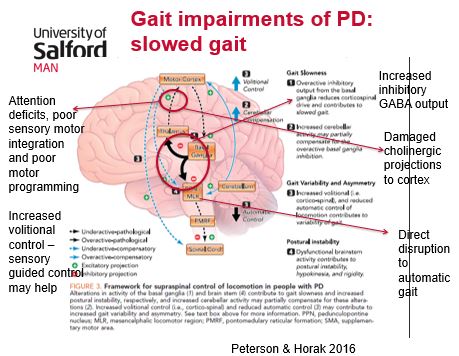
Feedforward Locomotor control: role of the basal ganglia
Loops from M1 area to basal ganglia may contribute to feedforward locomotor control affording adaptive locomotor ability E.g. Dorsal premotor area – sensory guided gait initiation
Gait impairments of PD: slowed gait
Foot sensations in Gait and Balance Training
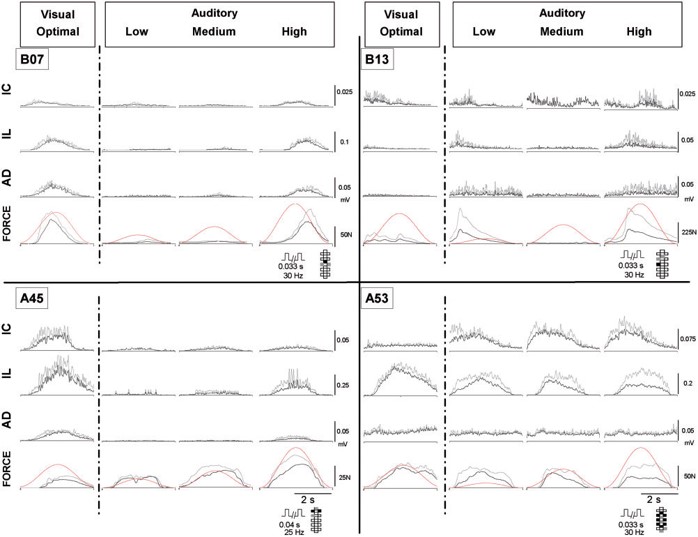
Locomotion is a “sensory flood” – how does foot sensation contribute amongst other inputs?
But, ability of any single input to affect locomotion is reduced when competing with other afferents and descending pathways (Ivanenko, Grasso, & Lacquaniti, 2000; Stephens & Yang, 1999; Whelan & Pearson, 1997).
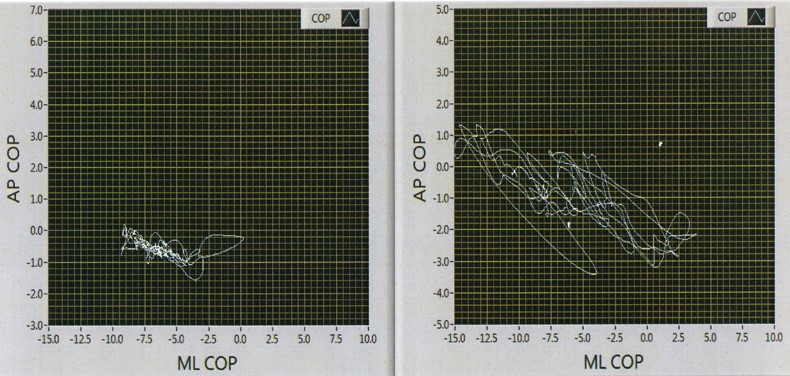
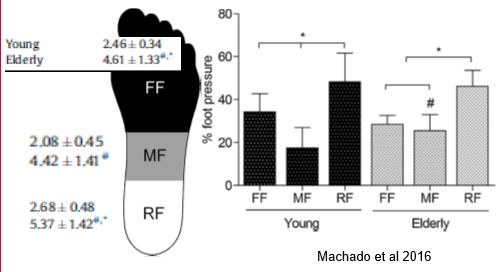
Reduced rear-foot pressure sensitivity with ageing is related to changes in pressure distribution in standing
No effects of pressure on EMG or gait kinematics
- Increased load insufficient
- Load sensed via combination of cutaneous, muscle and joint receptors. So effect of a single receptor is lost amongst multi-modal integration
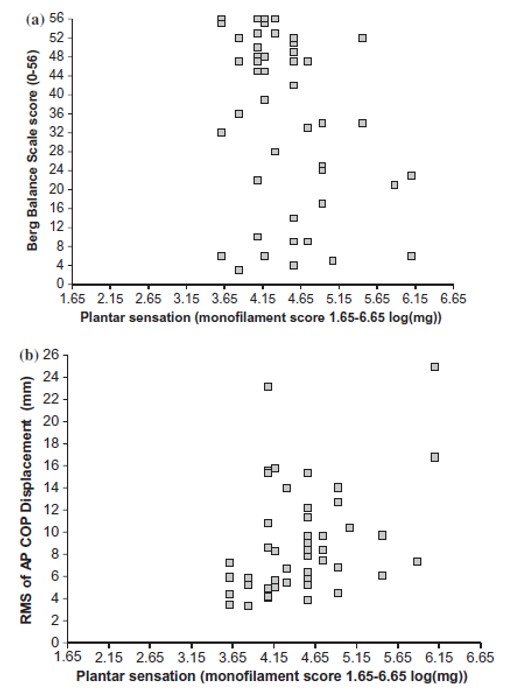
Little relationship between foot sensation and balance in stroke survivors